In the “Research Matters” series, we visit labs across campus to hear directly from Stanford scientists about what they’re working on, how it could advance human health and well-being, and why universities are critical players in the nation’s innovation ecosystem. The following are the researchers’ own words, edited and condensed for clarity.
I liked video games a lot growing up, and being a programmer gave me a legitimate reason to play them. But physics was always my passion.
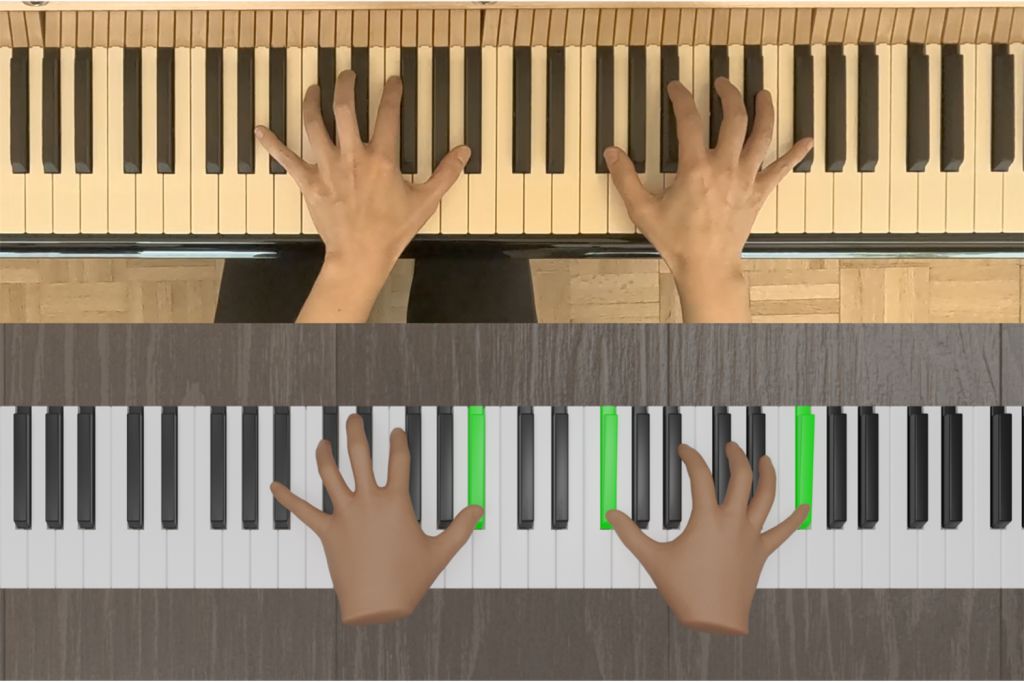
So when I got into computer science, I found my way to the character animation side of computer graphics. I was interested in developing algorithms to allow digital agents to act and move like humans, but in a physically simulated world. So, not just making computer animation the way traditional artists make animation, but physics-based animation generated through a model that emulates the real F=ma, if you will.
My goal had been to build truly intelligent, simulated human characters that could do everything we do in the real world. And then the world changed in two surprising ways that completely changed my vision for my career.
The first surprise was that humanoid robot technology had matured to the point that everything I was doing in simulation could now be done in the real world. The second was that everything we’d done in the last 20 years for computer animation could almost be just translated to humanoids without inventing new methodologies.
That shifted my focus, but it also confirmed that we should double down on the simulation work, where we can move forward at a much more aggressive pace. We now have evidence that work is translatable to the real world. So we’re pushing in both directions.
My research focuses on embodied intelligence, a form of AI that enables robots in the physical world and characters in animation and virtual reality to gather information, observe their environment, and take actions that change the state of their world.
“Twisting a cap to open a bottle, manipulating a soft object like a scarf – how do you put it on your neck? We want robots to be able to do all of that.”
My lab sits at the intersection of two seemingly very different, unrelated fields: computer graphics and robotics. The algorithms and methods we develop can apply to both digital characters and humanoid robots. The way they embody intelligence is very similar, even though the application domains are quite different.
People tend to think of motion and intelligence as two separate entities. Our lab focuses on “motion intelligence,” which is basically the entire spectrum from cognitive-level decision-making, which includes observation and processing information, all the way to the actuation level – how do you turn a decision into an action that can actually change the physical state of the world?
When it comes to humanoids, we focus mostly on the functional level. In terms of locomotion, we want a robot to move agilely and safely around people, navigate space, not bump into things. And if you think about manipulating and interacting with objects, that’s an even richer space for research. Twisting a cap to open a bottle, manipulating a soft object like a scarf – how do you put it on your neck? We want robots to be able to do all of that.
It’s not so much about having a specialized humanoid that can do your laundry or wash the dishes. What I’m trying to build is a fundamental set of skills, what I call a pre-trained humanoid. Trained at the level of what, say, a 10-year-old human, can do, but not yet specialized. Once we have that, it’s providing a platform, like an iPhone. People can write applications for it. That’s the level of foundation we’re trying to build. People will take it and build applications we haven't even imagined yet.
I think a lot of the value of academia in AI and robotics research comes from scientific inquiry. Industry tends to quickly converge on a recipe that works, and then scale up as fast as possible. In academia, we're not bound by that kind of pressure. We can ask, why do we use these ingredients? Is this approach good for all scenarios, or just some, and why? We also have the advantage in terms of talent. We’re actually creating and shaping talent by providing the education and everything it needs to develop.
Using my role as a Stanford professor to share this very new, very powerful technology is a mission for me. This new world of intelligent robots will impact the next generation the most. College-age students and young researchers just starting in the field should be the ones shaping where we’re going.

For more information
C. Karen Liu is a professor of computer science and the director of The Movement Lab. She is a member of Bio-X and the Wu Tsai Human Performance Alliance, and a faculty affiliate of the Institute for Human-Centered Artificial Intelligence (HAI).
Photographer
Andrew Brodhead