
Right now, about 500,000 pieces of human-made debris are whizzing around space, orbiting our planet at speeds up to 17,500 miles per hour. This debris poses a threat to satellites, space vehicles and astronauts aboard those vehicles.
Go to the web site to view the video.
What makes tidying up especially challenging is that the debris exists in space. Suction cups don’t work in a vacuum. Traditional sticky substances, like tape, are largely useless because the chemicals they rely on can’t withstand the extreme temperature swings. Magnets only work on objects that are magnetic. Most proposed solutions, including debris harpoons, either require or cause forceful interaction with the debris, which could push those objects in unintended, unpredictable directions.
To tackle the mess, researchers from Stanford University and NASA’s Jet Propulsion Laboratory (JPL) have designed a new kind of robotic gripper to grab and dispose of the debris, featured in the June 27 issue of Science Robotics.

Hao Jiang, graduate student in the Cutkosky lab and lead author of the paper, shows a basketball being gripped by the gecko-inspired adhesive. (Image credit: Kurt Hickman)
“What we’ve developed is a gripper that uses gecko-inspired adhesives,” said Mark Cutkosky, professor of mechanical engineering and senior author of the paper. “It’s an outgrowth of work we started about 10 years ago on climbing robots that used adhesives inspired by how geckos stick to walls.”
The group tested their gripper, and smaller versions, in their lab and in multiple zero gravity experimental spaces, including the International Space Station. Promising results from those early tests have led the researchers to wonder how their grippers would fare outside the station, a likely next step.
“There are many missions that would benefit from this, like rendezvous and docking and orbital debris mitigation,” said Aaron Parness, MS ’06, PhD ’10, group leader of the Extreme Environment Robotics Group at JPL. “We could also eventually develop a climbing robot assistant that could crawl around on the spacecraft, doing repairs, filming and checking for defects.”
Creating a gecko gripper
The adhesives developed by the Cutkosky lab have previously been used in climbing robots and even a system that allowed humans to climb up certain surfaces. They were inspired by geckos, which can climb walls because their feet have microscopic flaps that, when in full contact with a surface, create a Van der Waals force between the feet and the surface. These are weak intermolecular forces that result from subtle differences in the positions of electrons on the outsides of molecules.
The gripper is not as intricate as a gecko’s foot – the flaps of the adhesive are about 40 micrometers across while a gecko’s are about 200 nanometers – but the gecko-inspired adhesive works in much the same way. Like a gecko’s foot, it is only sticky if the flaps are pushed in a specific direction but making it stick only requires a light push in the right direction. This is a helpful feature for the kinds of tasks a space gripper would perform.
“If I came in and tried to push a pressure-sensitive adhesive onto a floating object, it would drift away,” said Elliot Hawkes, MS ‘11, PhD ‘15, a visiting assistant professor from the University of California, Santa Barbara and co-author of the paper. “Instead, I can touch the adhesive pads very gently to a floating object, squeeze the pads toward each other so that they’re locked and then I’m able to move the object around.”
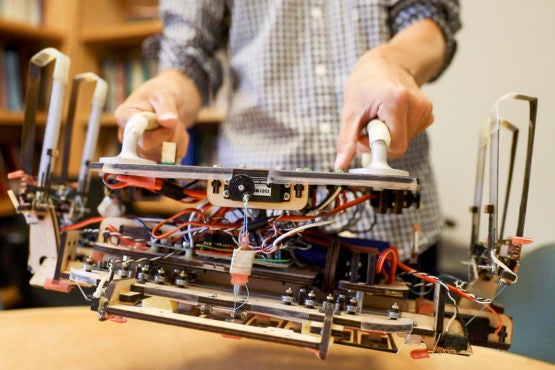
Close up of the robotic gripper made by the Cutkosky lab at Stanford University. The gripper is designed to grab objects in zero gravity using their gecko-inspired adhesive. (Image credit: Kurt Hickman)
The pads unlock with the same gentle movement, creating very little force against the object.
The gripper the researchers created has a grid of adhesive squares on the front and arms with thin adhesive strips that can fold out and move toward the middle of the robot from either side, as though it’s offering a hug. The grid can stick to flat objects, like a solar panel, and the arms can grab curved objects, like a rocket body.
One of the biggest challenges of the work was to make sure the load on the adhesives was evenly distributed, which the researchers achieved by connecting the small squares through a pulley system that also serves to lock and unlock the pads. Without this system, uneven stress would cause the squares to unstick one by one, until the entire gripper let go. This load-sharing system also allows the gripper to work on surfaces with defects that prevent some of the squares from sticking.
The group also designed the gripper to switch between a relaxed and rigid state.
“Imagining that you are trying to grasp a floating object, you want to conform to that object while being as flexible as possible, so that you don’t push that object away,” explained Hao Jiang, a graduate student in the Cutkosky lab and lead author of the paper. “After grasping, you want your manipulation to be very stiff, very precise, so that you don’t feel delays or slack between your arm and your object.”
Testing in zero-G
The group first tested the gripper in the Cutkosky lab. They closely measured how much load the gripper could handle, what happened when different forces and torques were applied and how many times it could be stuck and unstuck. Through their partnership with JPL, the researchers also tested the gripper in zero gravity environments.
In JPL’s Robodome, they attached small rectangular arms with the adhesive to a large robot, then placed that modified robot on a floor that resembled a giant air-hockey table to simulate a 2D zero gravity environment. They then tried to get their robot to scoot around the frictionless floor and capture and move a similar robot.
“We had one robot chase the other, catch it and then pull it back toward where we wanted it to go,” said Hawkes. “I think that was definitely an eye-opener, to see how a relatively small patch of our adhesive could pull around a 300 kilogram robot.”
Next, Jiang and Parness went on a parabolic airplane flight to test the gripper in zero gravity. Over two days, they flew a series of 80 ascents and dives, which created an alternating experience of about 20 seconds of 2G and 20 seconds of zero-G conditions in the cabin. The gripper successfully grasped and let go of a cube and a large beach ball with a gentle enough touch that the objects barely moved when released.
Lastly, Parness’s lab developed a small gripper that went up in the International Space Station (ISS), where they tested how well the grippers worked inside the station.
Next steps for the gripper involve readying it for testing outside the space station, including creating a version made of longer lasting materials able to hold up to high levels of radiation and extreme temperatures. The current prototype is made of laser-cut plywood and includes rubber bands, which would become brittle in space. The researchers will have to make something sturdier for testing outside the ISS, likely designed to attach to the end of a robot arm.
Back on Earth, Cutkosky also hopes that they can manufacture larger quantities of the adhesive at a lower cost. He imagines that someday gecko-inspired adhesive could be as common as Velcro.
Additional Stanford co-authors are Matthew A. Estrada, Srinivasan A. Suresh, Amy K. Han, Shiquan Wang and Christopher J. Ploch. Christine Fuller and Neil Abcouwer of NASA JPL are also co-authors. Cutkosky is also a member of Stanford Bio-X and the Stanford Neurosciences Institute.
This work was funded by NASA, the National Science Foundation and a Samsung Scholarship.
Media Contacts
Taylor Kubota, Stanford News Service: (650) 724-7707; tkubota@stanford.edu